隨著自主航行技術(shù)的快速發(fā)展,無人水面艇(USV)在海洋測(cè)繪、環(huán)境監(jiān)測(cè)、安防巡邏等領(lǐng)域的應(yīng)用日益廣泛。Pixhawk,作為開源硬件領(lǐng)域的明星項(xiàng)目,憑借其成熟的硬件平臺(tái)、強(qiáng)大的ArduPilot/PX4開源飛控軟件生態(tài)以及活躍的開發(fā)者社區(qū),為無人艇的敏捷開發(fā)提供了堅(jiān)實(shí)的技術(shù)基礎(chǔ)。本文將探討基于Pixhawk開源飛控進(jìn)行無人艇導(dǎo)航系統(tǒng)開發(fā)的核心流程、關(guān)鍵技術(shù)挑戰(zhàn)與解決方案。
一、 系統(tǒng)架構(gòu)與硬件集成
無人艇導(dǎo)航系統(tǒng)通常由感知、決策、執(zhí)行三個(gè)核心層構(gòu)成。Pixhawk飛控(通常選用其衍生的如Pixhawk 4或Cube系列)作為系統(tǒng)的“大腦”和決策中樞,負(fù)責(zé)融合多傳感器數(shù)據(jù)、運(yùn)行導(dǎo)航算法并輸出控制指令。
- 硬件選型與連接:
- 主控制器:Pixhawk飛控板,運(yùn)行經(jīng)過適配的ArduRover或PX4 Rover固件。
- 感知傳感器:
- 定位:RTK-GPS模塊(如Here+或Here3),提供厘米級(jí)絕對(duì)位置與航向,是導(dǎo)航精度的關(guān)鍵。
- 姿態(tài):飛控內(nèi)置的IMU(慣性測(cè)量單元)提供艇體橫滾、俯仰和艏向角速率,結(jié)合GPS航向或磁力計(jì)(需注意艇上金屬干擾)進(jìn)行姿態(tài)解算。
- 避障:可選配激光雷達(dá)、毫米波雷達(dá)或超聲波傳感器,用于近距離障礙物檢測(cè)。
- 環(huán)境感知:攝像頭(用于視覺識(shí)別與跟蹤)、風(fēng)速風(fēng)向儀等。
- 執(zhí)行機(jī)構(gòu):通過Pixhawk的PWM/舵機(jī)輸出通道連接電調(diào)(控制推進(jìn)電機(jī)轉(zhuǎn)速)與舵機(jī)(控制舵角),實(shí)現(xiàn)對(duì)艇體速度和航向的直接控制。
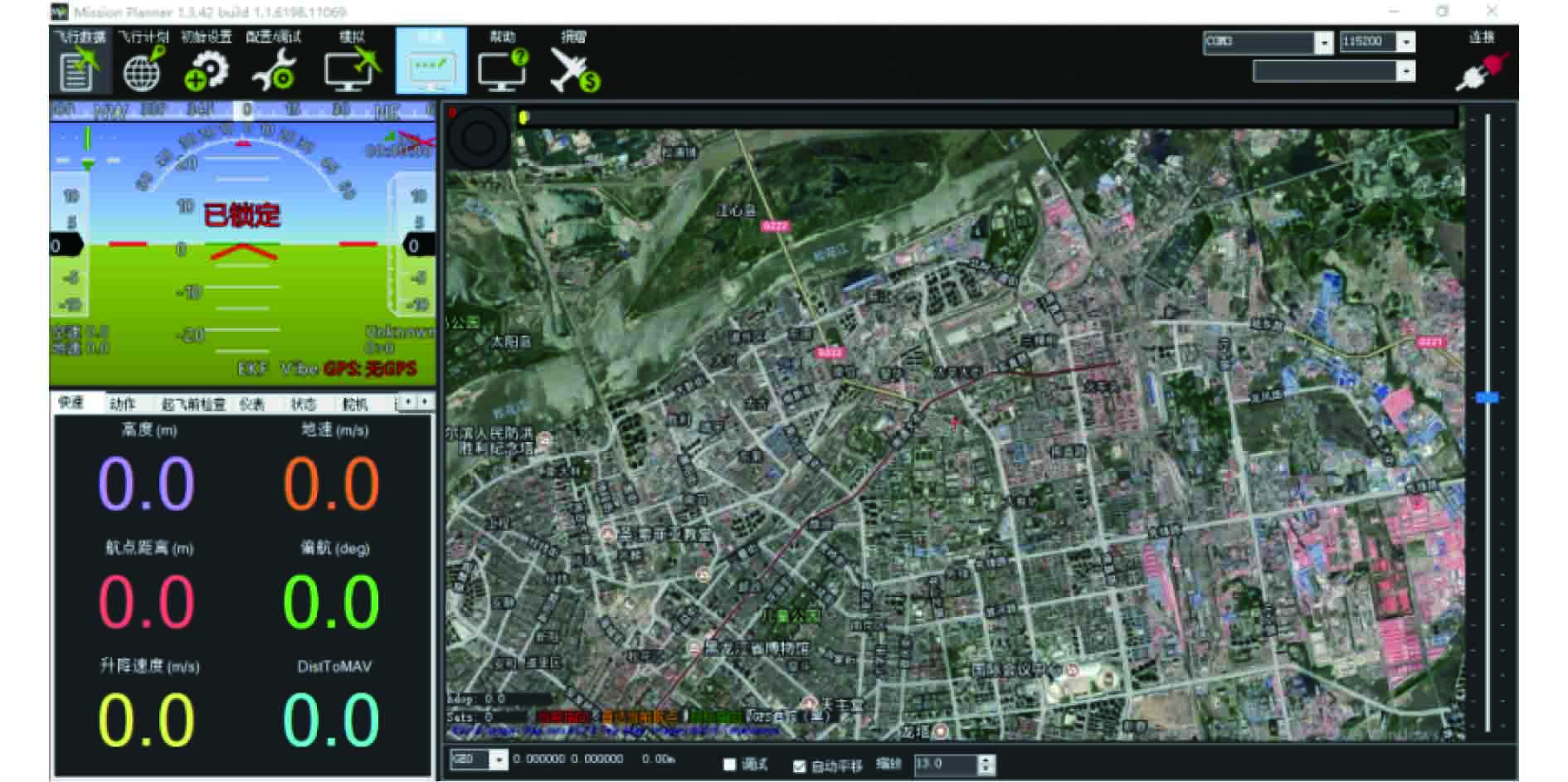
- 通信鏈路:數(shù)傳電臺(tái)(如3DR Radio)用于地面站(如Mission Planner或QGroundControl)的遠(yuǎn)程監(jiān)控與任務(wù)指令下發(fā);可選4G/5G模塊實(shí)現(xiàn)超視距通信。
2. 固件選擇與配置:
ArduPilot的ArduRover固件或PX4的Rover固件均針對(duì)地面/水面載具進(jìn)行了深度優(yōu)化。開發(fā)者需根據(jù)硬件準(zhǔn)確選擇并燒錄固件,隨后在地面站進(jìn)行詳細(xì)的參數(shù)校準(zhǔn)與配置,包括:羅盤校準(zhǔn)、加速度計(jì)校準(zhǔn)、舵機(jī)輸出通道映射、PID控制器參數(shù)整定等。
二、 導(dǎo)航算法開發(fā)與實(shí)現(xiàn)
基于Pixhawk的導(dǎo)航開發(fā),核心在于利用其強(qiáng)大的擴(kuò)展性,在現(xiàn)有導(dǎo)航框架上實(shí)現(xiàn)定制化功能。
1. 航點(diǎn)導(dǎo)航與路徑跟蹤:
這是最基本的功能。通過地面站規(guī)劃一系列航點(diǎn)(Waypoints)并下發(fā)給飛控。飛控內(nèi)置的導(dǎo)航算法(如純追蹤算法、線性導(dǎo)航算法)會(huì)計(jì)算當(dāng)前位姿與目標(biāo)航線的偏差,并通過PID控制器生成舵角和油門指令,引導(dǎo)無人艇沿預(yù)定路徑航行。開發(fā)者可以調(diào)整跟蹤算法的參數(shù)(如前瞻距離)以適應(yīng)不同艇型和海況。
2. 自主避障與局部路徑重規(guī)劃:
這是導(dǎo)航開發(fā)的高級(jí)課題。Pixhawk固件支持通過MAVLink協(xié)議接收外部計(jì)算機(jī)(如機(jī)載Jetson Nano、樹莓派)發(fā)送的障礙物信息或?qū)Ш街噶睢5湫偷拈_發(fā)模式是:
- 感知傳感器(如激光雷達(dá))的數(shù)據(jù)由協(xié)處理器處理,生成局部障礙地圖。
- 運(yùn)行在協(xié)處理器上的避障算法(如動(dòng)態(tài)窗口法DWA、時(shí)間彈性帶TEB)根據(jù)全局路徑和實(shí)時(shí)障礙信息,計(jì)算出一條安全的局部路徑或速度指令。
* 通過MAVLink消息(如SET<em>POSITION</em>TARGET<em>LOCAL</em>NED)將修正后的目標(biāo)點(diǎn)或速度指令實(shí)時(shí)發(fā)送給Pixhawk飛控執(zhí)行。
這種方式實(shí)現(xiàn)了“Pixhawk負(fù)責(zé)穩(wěn)定控制與底層執(zhí)行,上位機(jī)負(fù)責(zé)智能決策”的異構(gòu)計(jì)算架構(gòu)。
3. 自適應(yīng)控制與抗風(fēng)浪干擾:
水面環(huán)境復(fù)雜,風(fēng)、浪、流干擾顯著。開發(fā)者可以:
- 調(diào)整和改進(jìn)Pixhawk的姿態(tài)與位置控制環(huán)PID參數(shù),增強(qiáng)其魯棒性。
- 開發(fā)基于模型或數(shù)據(jù)的自適應(yīng)控制器,作為Pixhawk的一個(gè)外部“插件”,通過MAVLink干預(yù)控制量輸出,補(bǔ)償環(huán)境擾動(dòng)。
- 利用狀態(tài)估計(jì)濾波器(如擴(kuò)展卡爾曼濾波EKF)更優(yōu)地融合GPS、IMU甚至流速計(jì)的數(shù)據(jù),提供更準(zhǔn)確的位姿估計(jì)。
三、 開發(fā)流程與工具鏈
- 仿真測(cè)試:在實(shí)艇測(cè)試前,利用Gazebo、SITL(Software In The Loop)仿真環(huán)境至關(guān)重要。ArduPilot/PX4都提供了豐富的水面艇模型和仿真世界。開發(fā)者可以在仿真中安全地測(cè)試導(dǎo)航邏輯、避障算法和參數(shù)整定效果,大幅降低開發(fā)風(fēng)險(xiǎn)和成本。
- 代碼開發(fā)與集成:
- 對(duì)于簡(jiǎn)單的邏輯修改或參數(shù)調(diào)整,可直接修改ArduPilot/PX4固件代碼并重新編譯。
- 對(duì)于復(fù)雜的獨(dú)立功能(如特定的決策算法),更推薦采用模塊化開發(fā)。使用C++/Python編寫?yīng)毩⒌墓δ苣K,運(yùn)行在飛控的Linux外部設(shè)備(如配套的配套計(jì)算機(jī))或獨(dú)立的協(xié)處理器上,通過MAVLink與飛控通信。這種方式保持了飛控核心的穩(wěn)定性,也便于算法迭代。
- 地面站與監(jiān)控:Mission Planner和QGroundControl提供了強(qiáng)大的任務(wù)規(guī)劃、參數(shù)調(diào)整、實(shí)時(shí)遙測(cè)數(shù)據(jù)監(jiān)控和日志分析功能。深入利用這些工具,是調(diào)試和優(yōu)化導(dǎo)航性能的關(guān)鍵。
四、 挑戰(zhàn)與展望
基于Pixhawk開發(fā)無人艇導(dǎo)航的挑戰(zhàn)主要在于:水面動(dòng)力學(xué)建模的復(fù)雜性、傳感器(尤其是磁力計(jì))在艇上受干擾的補(bǔ)償、復(fù)雜海況下的可靠性保證,以及多艇協(xié)同的通信與調(diào)度。
隨著Pixhawk生態(tài)的持續(xù)演進(jìn)(如對(duì)ROS 2的更佳支持、更強(qiáng)大的協(xié)處理器集成),以及AI技術(shù)的融合,基于此平臺(tái)將能開發(fā)出更智能、更適應(yīng)復(fù)雜環(huán)境、具備更強(qiáng)集群協(xié)作能力的無人艇導(dǎo)航系統(tǒng)。開源的力量,正持續(xù)降低無人艇技術(shù)的門檻,推動(dòng)著海洋智能化應(yīng)用的蓬勃發(fā)展。